
, практически не сбиваясь с ритма \"брачного танца\"")


Большинство насекомых обладают способностью чрезвычайно быстро адаптироваться к непрерывно меняющимся условиям окружающей среды. Эти навыки вдохновляют многих исследователей на создание всевозможных роботов, в том числе и гибридных, когда устройство действует сообща с живым организмом.
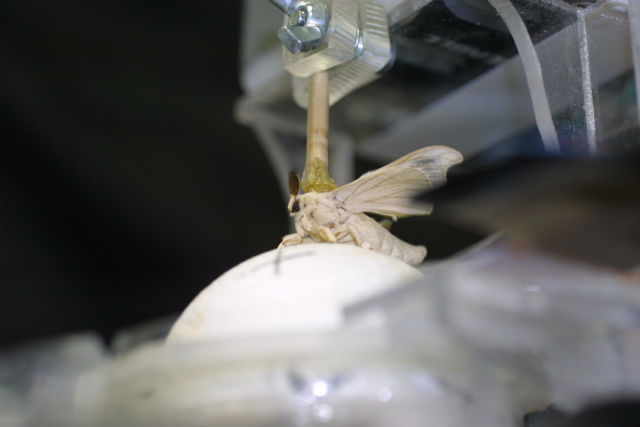
Так, японские специалисты из университета Токио (University of Tokyo) создали робота, которым может управлять бабочка тутового шелкопряда.
Основной задачей этого эксперимента было выяснить, как насекомое будет приспосабливаться к сложным условиям передвижения. А именно, бабочка, находясь внутри машины, должна была балансировать на свободно движущемся шарике из полистирола, похожем на тот, которым оборудуют компьютерные мыши.
В таких нетривиальных условиях от насекомого ожидали передвижения в сторону источника привлекательного запаха. Для этого лучше всего подошли феромоны женских особей − вещества, которые выделяют самки шелкопряда, чтобы их обнаружил потенциальный партнёр.
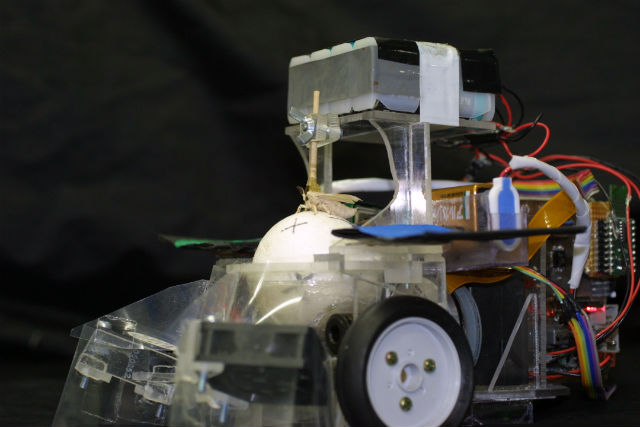
Робот был также оснащён двумя 4-сантиметровыми вентиляторами, которые отводили воздух с феромонами от антенн насекомого, создавая тем самым воздушный поток, необходимый бабочке для ориентации по запаху. Исследователи полагают, что их устройство с большим успехом имитирует циркуляцию воздуха, образуемую крыльями насекомого во время свободного полёта.
В ходе экспериментов, учёные во главе с доктором Нориясу Андо (Noriyasu Ando) всячески пытались усложнить бабочкам жизнь, отворачивая машину в сторону от намеченной цели, чтобы заставить шелкопрядов на ходу приспосабливаться.
Для контроля за происходящим на корпусе робота были закреплены чувствительные датчики, которые фиксировали данные о близости источника феромонов, искусственных отклонениях от курса и действиях насекомого, преодолевающего возникшие препятствия.
Учёные выяснили интересные особенности. Например, почуяв близость потенциального партнёра, шелкопряд начинал "брачный танец", для которого характерен особый набор шагов: как прямых, так и зигзагообразных.
В статье, опубликованной в журнале Bioinspiration&Biomimetics, сообщается, что все 14 бабочек-участников с успехом справились с поставленной задачей и достигли источника феромонов, практически не сбиваясь с ритма "танца".
Исследователи отмечают, что в ходе экспериментов с одним из самых простых типов поведения – движением на запах, им удалось проанализировать механизмы формирования этого самого поведения с уровня одного нейрона. По мнению специалистов, эта бесценная информация приближает учёных ещё на один шаг к созданию искусственного интеллекта.
Ну, а в более близкой перспективе у японских исследователей стоит создание автономного робота, который сможет двигаться на запах, руководствуясь принципами, подсмотренными у живого организма.
Также по теме:
Британцы создали робота из искусственных органов и конечностей
Летающих нанороботов научили играть музыку
Армия из сотни килоботов научилась действовать сообща
Японцы учат листообразного робота покорять любой ландшафт
Китайские инженеры научили микроробота прыгать, отталкиваясь от воды
Инженеры Гарварда научили мягкого робота маскироваться под окружающую среду
