





Уже ни для кого не новость, что первопроходцами дальнего космоса станут вовсе не люди и даже не животные, а роботы. Робототехника на сегодняшний день развита достаточно хорошо, чтобы человек мог довериться искусственному разуму в вопросах освоения других планет, спутников и астероидов. К чему подвергать себя излишней опасности, если изначально все подводные камни может испытать на себе робот?
Конечно же, мало кто из "дроидов" может похвастаться полной самостоятельностью и независимостью от человека. Перспектива освоения ими космоса предполагает, что люди будут дистанционно управлять роботами и роверами с очень большого расстояния. Чтобы понять, как всё это будет работать, NASA запустило уникальный эксперимент.

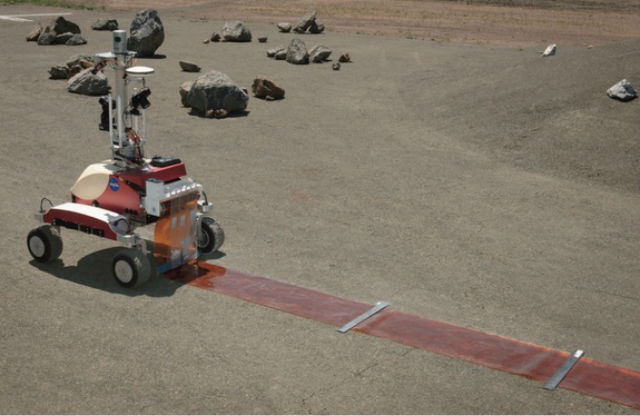
В понедельник 17 июня 2013 года прошёл первый успешный тест-драйв. Космонавт и борт-инженер NASA Крис Кэссиди (Chris Cassidy), находясь на борту Международной космической станции, дистанционно управлял ровером K10, который должен был перемещаться по наземной площадке под названием Roverscape (дословно — "пейзаж для роверов"). Эта площадка похожа на ухабистую поверхность Луны. Она была построена специально для тестирования роботов и роверов на предмет их "профпригодности" для выполнения космических миссий.
Для осуществления дистанционного контроля Кэссиди снабдили телеметрической аппаратурой и видео в реальном времени, чтобы космонавт мог следить за реакцией ровера на свои команды.
"Мы успешно провели первый тест по дистанционному управлению наземным ровером с МКС. Кэссиди использовал ровер K10 для исследования местности, а также с его помощью установил каптоновую радио-антенну", — рассказывает глава Группы интеллектуальной робототехники при Исследовательском центре Эймса (Intelligent Robotics Group) Терри Фун (Terry Fong). По его словам, дальнейшие тесты пройдут в конце июля и в августе. Все они будут направлены на дистанционное размещение антенн при помощи роверов.
"Мы всё ещё утверждаем дату следующего испытания, но мы предполагаем, что это случится после 22 июля", — поделился планами Фун. Он также сообщил, что необходимо будет понять, как разрешить ситуацию, если вдруг ровер выйдет из-под контроля, но с таким они ещё не сталкивались.
Фун и его коллеги очень довольны результатами тест-драйва. Они даже предоставили список небольших рекордов, которые им удалось поставить в ходе эксперимента:
- Первое в мире дистанционное управление в реальном времени наземным объектом с космической станции;
- Первый оперативно-диспетчерский контроль за наземным ровером из космоса;
- Первый в истории космонавт, который осуществлял контроль и управление наземным роботом;
- Первый случай использования базы данных NASA для связи компьютера космонавта с роботом, находящимся за пределами космической станции;
- Первый раз, когда была использована система RAPID для передачи сообщений роботам из космоса.
Первой миссией, для которой пригодится опыт дистанционного управления ровером, станет L2-Farside (подробнее в документе PDF). В рамках этой миссии учёные NASA предложили отправить в космическое путешествие не людей, а роботов, чтобы снизить риск и затраты. Полёт пройдёт в несколько этапов: наблюдение за астероидами, разведка местности астероида, полёт к Луне, исследование её тёмной стороны, изучение Деймоса (одного из естественных спутников Марса) и, наконец, изучение самого Марса с поверхности Деймоса.

Астрофизик и директор Института селенологии NASA (Lunar Science Institute) Джек Бёрнс (Jack Burns) выступил инициатором этой идеи. Он предложил отправить пилотируемый корабль Орион (Orion spacecraft) в точку Лагранжа L2 системы Луна-Земля (это примерно 61 500 километров от Луны), откуда космонавты смогут дистанционно управлять ровером, находящимся на дальней стороне Луны. Их задачей будет установить там низко-радиочастотную антенну из полиамидной плёнки.
"Как только мы установим такое устройство на дальней стороне Луны, мы сможем подробно изучить происхождение первых звёзд и галактик, которые сформировались всего лишь через 100 тысяч лет после Большого Взрыва", — рассказал Бёрнс.
Также по теме:
На МКС впервые отправится говорящий робот
Робот-горилла сможет управлять космическим кораблем
Американцы разрабатывают робот-экскаватор для работы на Луне и Марсе
NASA готовится построить новую космическую станцию за Луной
На МКС появятся автономные роботы-сферы
